Member field trip: Quadrotors and datacenters
 When first stepping through the door, the University of Michigan’s Walter E. Wilson Student Team Project Center feels familiar, like a well-equipped hackerspace/makerspace. A Haas vertical mill dominates the main floor, more modern than i3’s but otherwise similar. In the back are manual mills and lathes, and a nontraditional vehicle (in this case, a solar car) hangs from the ceiling. Upstairs, an electronics lab is giving rise to the next generation of self-contained autonomous quadrotor helicopters. There’s a feeling of easy camaraderie and a subtle sense that the future is taking shape within these walls.
When first stepping through the door, the University of Michigan’s Walter E. Wilson Student Team Project Center feels familiar, like a well-equipped hackerspace/makerspace. A Haas vertical mill dominates the main floor, more modern than i3’s but otherwise similar. In the back are manual mills and lathes, and a nontraditional vehicle (in this case, a solar car) hangs from the ceiling. Upstairs, an electronics lab is giving rise to the next generation of self-contained autonomous quadrotor helicopters. There’s a feeling of easy camaraderie and a subtle sense that the future is taking shape within these walls.
What’s different about the Wilson STPC is that there’s no hobby activity here — no couch, no gaming, no rogue bumper stickers, no tinkering for the sake of tinkering. Use of the Center is for students only, of course, but beyond that, it’s restricted to official student teams competing in various events. Among them is the Michigan Autonomous Aerial Vehicles team, competing in the International Aerial Robotics Competition. Dissatisfied with the suitability of commercially available UAV platforms, MAAV is building their own, and they were kind enough to give i3 Detroit a behind-the-scenes tour on Sunday.
 Unlike the internet-darling quadrotors performing aerobatics in a sensor-studded room, MAAV’s machines are almost entirely self-contained, designed to operate in an uncontrolled environment. So in addition to the obvious motors and rotors and batteries, they’re flying sensor platforms, with two onboard LIDAR units, accelerometers, gyroscopes, cameras, and several processors to handle the numerous tasks required. That’s all fixed to an astonishingly strong carbon-fiber frame, home-brewed using a novel molding technique.
Unlike the internet-darling quadrotors performing aerobatics in a sensor-studded room, MAAV’s machines are almost entirely self-contained, designed to operate in an uncontrolled environment. So in addition to the obvious motors and rotors and batteries, they’re flying sensor platforms, with two onboard LIDAR units, accelerometers, gyroscopes, cameras, and several processors to handle the numerous tasks required. That’s all fixed to an astonishingly strong carbon-fiber frame, home-brewed using a novel molding technique.
i3 Detroit’s tour group got to meet several MAAV team members, check out various early and current hardware versions, and ask tons of questions. As several of our members have robotics and quadrotor experience, there was idea-sharing in both directions.
To demonstrate the stability of the quadrotor’s control system, our guide Jonathan told it to take off and hover at a particular position, and then grabbed one corner of the machine and pulled it several feet out-of-place. It returned immediately to its commanded position and held there, steady as a hummingbird, until commanded to go somewhere else. See the full video of the demonstration here.
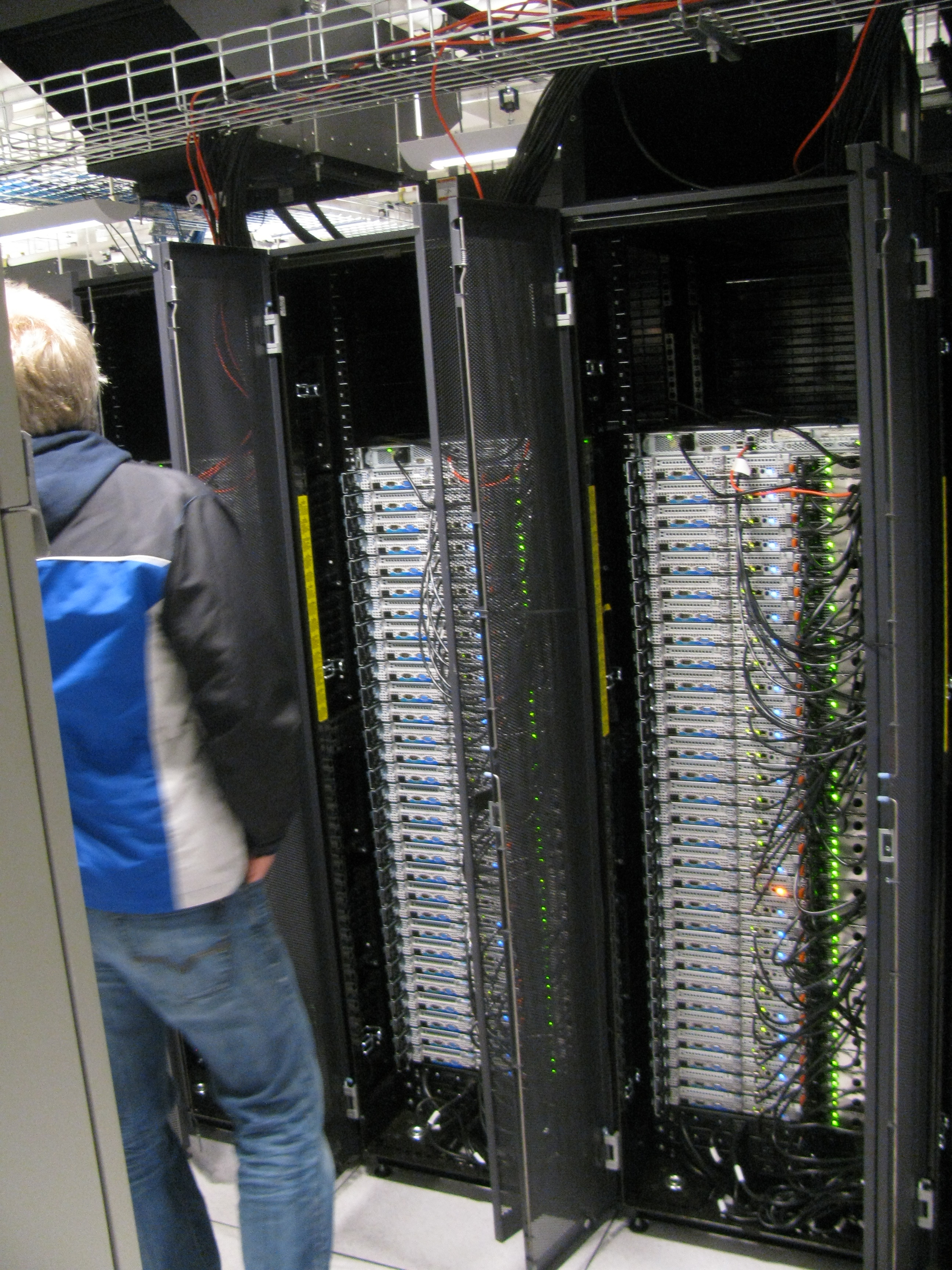 After leaving the STPC, half of our group continued on to the day’s second destination, a datacenter by the name of MACC: the Michigan Academic Computing Center. Housing servers and equipment for numerous university departments, it’s a rack-mounted forest of Infiniband cables, storage arrays, and machines with names like “dixiedynamite”. We compared notes about power and cooling, talked about fiber optics and interconnect latency, and hunted down a lone GPS time server.
After leaving the STPC, half of our group continued on to the day’s second destination, a datacenter by the name of MACC: the Michigan Academic Computing Center. Housing servers and equipment for numerous university departments, it’s a rack-mounted forest of Infiniband cables, storage arrays, and machines with names like “dixiedynamite”. We compared notes about power and cooling, talked about fiber optics and interconnect latency, and hunted down a lone GPS time server.
There are plenty of interesting places in southeast Michigan, and with these field trips, we’re exploring some of them. Stay tuned!
Another angle of the quadrotor demo video: https://www.youtube.com/watch?v=LI82cKJbKtQ